
![文字サイズ[小]](./themes/EA_JP/fss_bt.gif "文字サイズ[小]")
![文字サイズ[大]](./themes/EA_JP/fsb_bt.gif "文字サイズ[大]")




データダウンロード
シリーズの特長
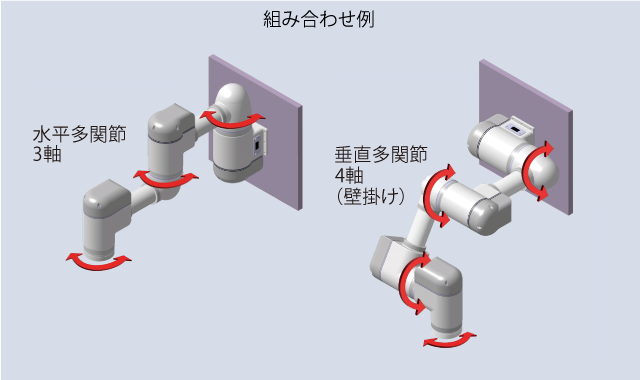
複数の回転モジュールとアーム部品を組合わせることによりロボットを自由に構成できます。
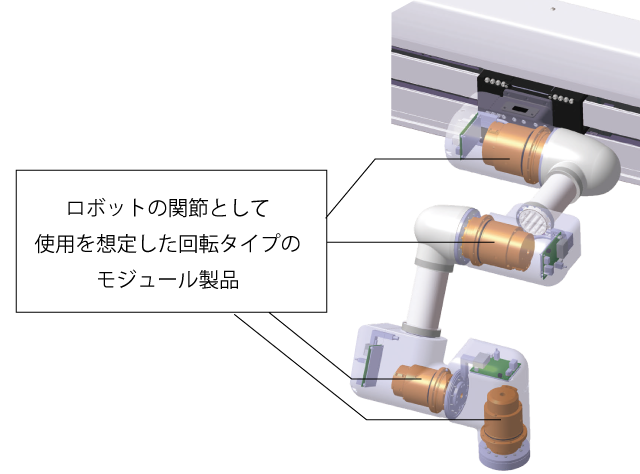
1. 一体型モジュール
減速機、モータ、エンコーダ、ブレーキをモジュールとして一体化することにより、部品選定・設計・組立にかかる工数を削減可能です。
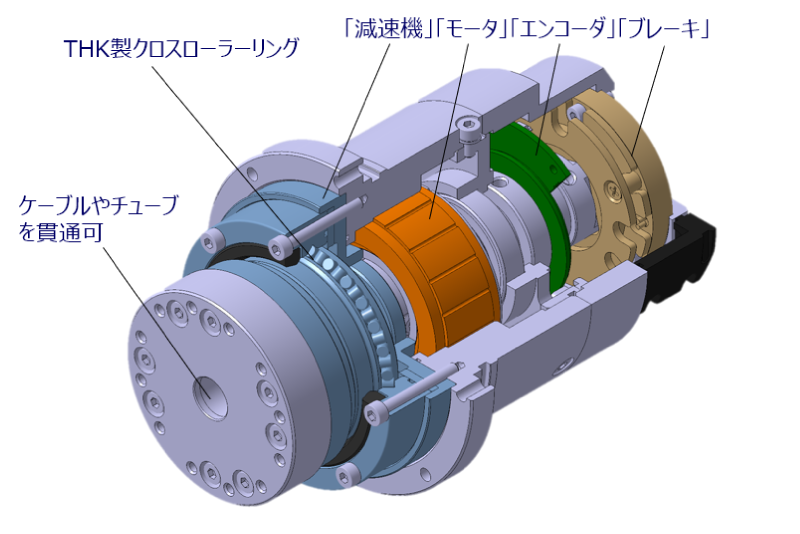
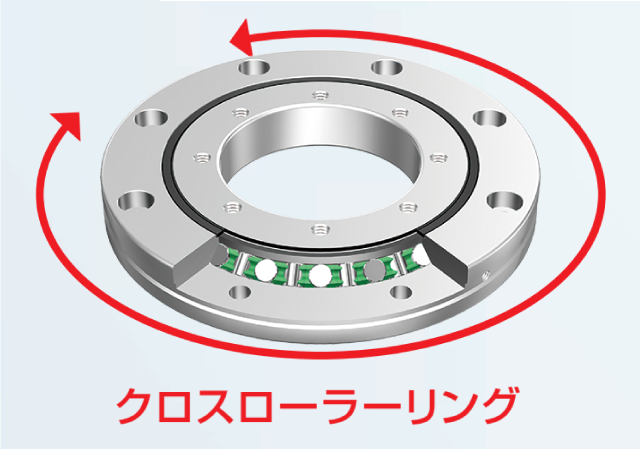
2. 高許容モーメント
THK製クロスローラーリングを主軸受に採用することで、大きなモーメントを負荷することが可能です。
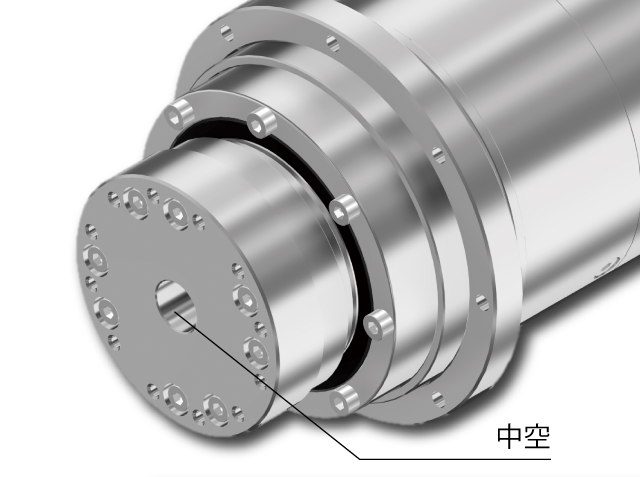
3. 中空構造
ケーブルやチューブを通すことができる中空構造のため構造の簡略化や省配線化が可能です。
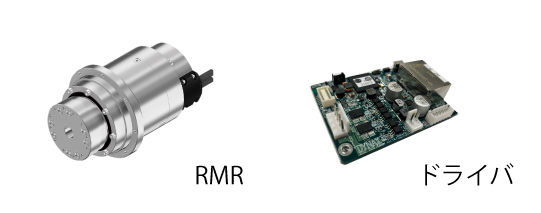
4. ドライバ別置き
ドライバをモジュールとは別置きとすることで、モジュール全長を小型化しました。また、モジュールおよびドライバの配置の自由度が向上します。

お問い合わせ


