
![文字サイズ[小]](./themes/EA_JP/fss_bt.gif "文字サイズ[小]")
![文字サイズ[大]](./themes/EA_JP/fsb_bt.gif "文字サイズ[大]")



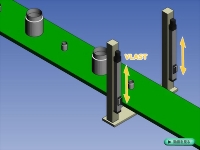
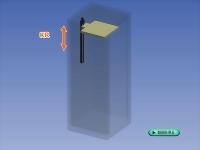
センサ昇降にVLASTを使用しています。アクチュエータを用いる事でセンサの投受光部を誤差無く動作させる事が可能な為、生産ラインの多品種対応化に貢献しました。
|
鉄鋼の幅を検査するカメラの移動部にKRを使用しています。検査部が重く、オフセットしている為、剛性の高い大型のKRを使用しています。
|
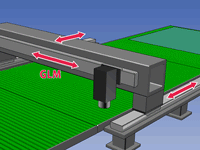
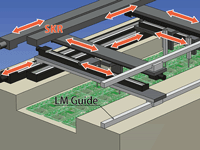
裂傷検査用顕微鏡の移動部にGLMを使用しています。リニアモータは非接触駆動のため発塵が少なく、ロングストロークにも対応可能なため、GLMが採用されました。
|
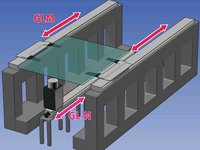
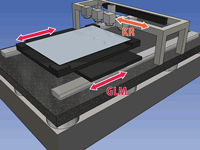
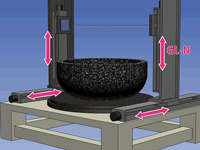
基板搬送部にGLMを、検査装置の移動部にGL-Nを使用しています。リニアエンコーダのフルクローズド制御により、高精度で信頼性の高いシステムが構築可能です。
|
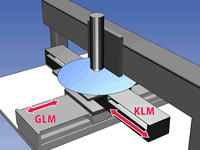
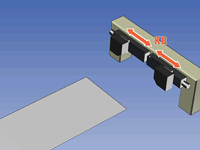
下軸にGLMを、上軸にKLMを使用しています。上軸はタクトが厳しく、コンパクトにしたいため、小型で推力のあるKLMが採用されました。
|
放射線測定器の移動部にKRを使用しています。重い測定器を片持ちで駆動させる為、モーメント負荷が大きく剛性の高いKRが採用されました。
|
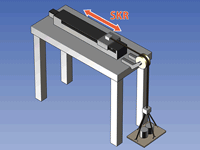
取手の耐久試験機の駆動部にSKRを使用しています。15kgの重さを高速で連続動作させるため、高剛性で長寿命のSKRが採用されました。
|
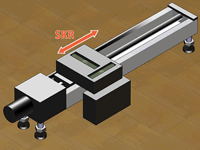
表面粗さの測定機にSKRを使用しています。電動化にする事で測定時の等速性が向上し、正確な測定を可能にしました。
|
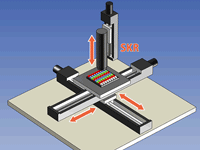
将棋の駒と麻雀パイをカメラで画像認識し、仕分け整列します。SKRは高剛性のため、片持ちでも高タクトな動作が可能です。
|

カメラユニットの移動部にVLASTを使用しています。カメラユニットが高価な為、ローコストのVLASTが採用されました。また、従動部にLMガイドを用いる事で、アクチュエータ1本での使用を可能にしました。
|

プローブの移動部にSKRを使用しています。検査には精度が必要となるため、高精度なSKRが採用されました。SKRの高剛性を活かし、整定時間を短くすることで、タクトタイム短縮を実現しました。
|
プローブの移動部にSKRを使用しています。剛性の高いSKRを使用することで、厳しい条件をクリアし、タクトタイム短縮を実現しました。
|
ワークの移動部にGLMを、カメラの移動軸にKRを使用しています。ロングストロークでも高速動作が可能なGLMを使用することで、大型のワークにも対応でき、タクトタイム短縮を実現しました。
|
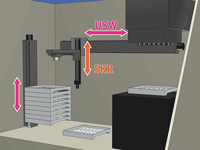
チャックの昇降部にSKRを、移動部にUSWを使用しています。ガラスプレートは壊れやすく、ハンドリングの精度が必要なため、高精度なSKRが採用されました。
|
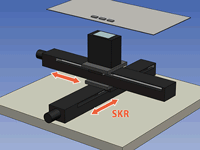
測定機移動部にSKRを使用しています。測定には精度が要求されるため、高精度・コンパクトなSKRが採用され、小型化にも成功いたしました。
|
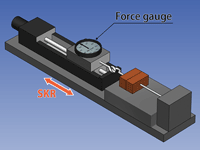
引張試験機にSKRを使用しています。接着力を測定する装置ですので、強い引張力にも耐えられるSKRが採用されました。
|
測定器の移動部にSKRを使用しています。高い精度が必要とされ、コンパクトに収まる事からSKRが採用されました。測定器には精度の要求が多いので、SKRがよく使用されます。
|
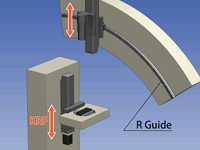
カメラの移動部と、試料の移動部にKRFを使用しています。KRFとRガイドを組合わせて移動させることで、あらゆる方向から、高精度に検査することが可能です。
|
測定器の移動部にGL-Nを使用しています。ワークの大きさ、高さ共に大きいものの測定が必要となり、ロングストロークでも軽量かつ高剛性なGL-Nが採用されました。
|
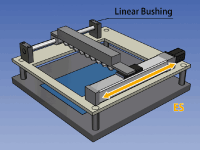
カメラ移動部にESを使用しています。ローコストでありながら正確な位置決めを行うESを採用し、さらにリニアブッシュと組み合わせることで、装置コストを低減させることに成功いたしました。
|

お問い合わせ


| 動画をご覧いただくには、Adobe Flash Playerが必要です。 お持ちでない方は、ダウンロードしてご覧ください。 Adobe Flash Playerをダウンロードする |
